- #include "stm32f10x.h"
- void GPIO_TimPWM(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);//
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //TIM_CH2 GPIOA_Pin_7输出
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure); //不解释
- }
- void TIM3_Configuration(void)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能TIM3
- //假如我要产生50Hz占空比为50%的PWM波,方便控制舵机
- //设置方法:
- //系统默认时钟为72MHz,预分频71+1次,得到TIM3计数时钟为1MHz
- //计数长度为19999+1=20000,可得PWM频率为1M/20000=50Hz
- //具体设置可参考上面的设置方法,简单明了!
- TIM_TimeBaseStructure.TIM_Prescaler = 72-1;//网上多数设置有误
- TIM_TimeBaseStructure.TIM_Period = 20000-1;
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- //设置时钟分割: TIM_CKD_DIV1 = 0,PWM波不延时(延时破坏占空比?待考证)
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
- TIM_ARRPreloadConfig(TIM3, DISABLE); //禁止ARR预装载缓冲器,也可以不用设置
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- //占空比设置方法:
- //占空比=(TIM_Pulse+1)/(TIM_Pulse+1)-(TIM_Period+1)=10000/20000=0.5=50%
- TIM_OCInitStructure.TIM_Pulse = 10000-1;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
- TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR2上的预装载寄存器
- //上面两句中的OC2确定了是channle几,要是OC3则是channel 3
- TIM_CtrlPWMOutputs(TIM3,ENABLE); //设置TIM2的PWM输出为使能
- TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的预装载寄存器
- TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
- }
- int main(void)
- {
- GPIO_TimPWM();
- TIM3_Configuration();
- while(1)
- {
- } ;
- }
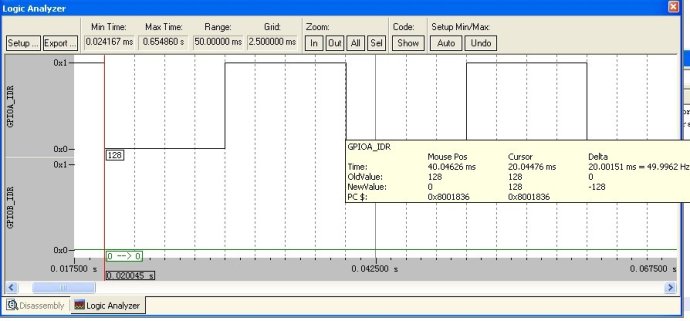
利用Keil逻辑分析仪分析PWM波形图:经过测试可以看出输出波形精度可靠!

本文转载自 http://blog.sina.com.cn/s/blog_6c3bf6670101chfb.html
本文作者为mengkun,转载请注明。
